Macchina Di Von Neumann
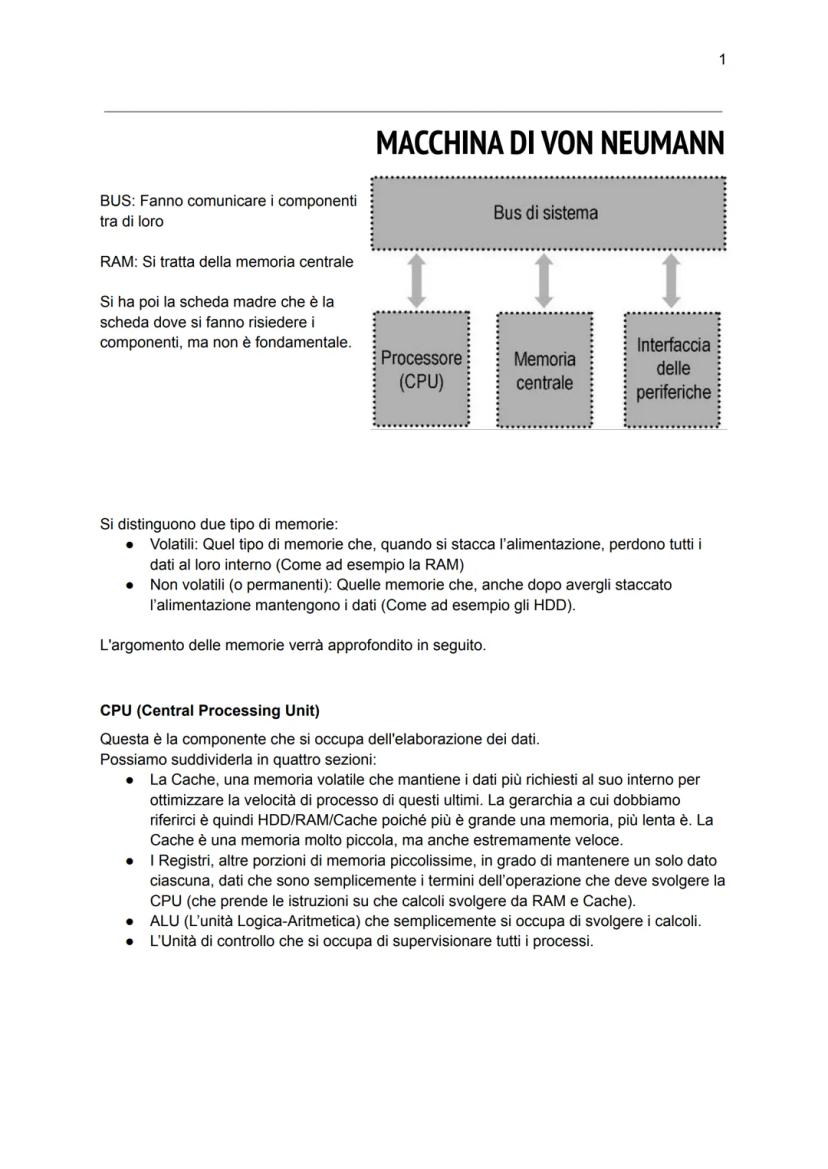
Appunti presi in merito alla macchina di Von Neumann: presenti argomenti come Bus, CPU, Cache, RAM, ROM e altre memorie.

















Pensavamo che non l'avreste mai chiesto....
Che cos'è l'assistente AI di Knowunity?
Il nostro assistente AI è costruito specificamente per le esigenze degli studenti. Sulla base dei milioni di contenuti presenti sulla piattaforma, possiamo fornire agli studenti risposte davvero significative e pertinenti. Ma non si tratta solo di risposte, l'assistente è in grado di guidare gli studenti attraverso le loro sfide quotidiane di studio, con piani di studio personalizzati, quiz o contenuti nella chat e una personalizzazione al 100% basata sulle competenze e sugli sviluppi degli studenti.
Dove posso scaricare l'applicazione Knowunity?
È possibile scaricare l'applicazione dal Google Play Store e dall'Apple App Store.
Knowunity è davvero gratuita?
Sì, hai accesso completamente gratuito a tutti i contenuti nell'app e puoi chattare o seguire i Creatori in qualsiasi momento. Sbloccherai nuove funzioni crescendo il tuo numero di follower. Inoltre, offriamo Knowunity Premium, che consente di studiare senza alcun limite!!
Contenuti più popolari: sistema informatico
9Informatica 1
Primi argomenti di informatica della prima superiore, Architettura di VON NEUMANN, Hardware software, Il case e la scheda madre, Periferiche e schede e porte di comunicazione, l’unità centrale di elaborazione e la memoria centrale, la memoria RAM…..
Introduzione all’Informatica
Questa è una presentazione sulle basi dell’informatica
Cos'è L'informatica, software e hardware ~ riassunto
ecco a voi un riassunto su Cos'è L'informatica, l'algoritmo, software e hardware, le memorie ecc...
Hardware & software
Riassunto hardware e software
I sistemi operativi
I sistemi operativi.
La struttura del Computer
Powerpoint sulla struttura del computer.
IL SISTEMA OPERATIVO
Presentazione riguardo il sistema operativo, le sue competenti, la storia del computer, i virus, i browsers e tanto altro
Software e Hardware
Informatica
Sistemi di Architettura e Von Neumann
Sistemi di elaborazione digitale e il computer
Contenuti più popolari di Informatica
9Stranger Things
Quanto Ne Sai Sulla Fantastica Serie Netflix Stranger Things??
Diagrammi di flusso
Appunti per ripasso dei diagrammi di flusso (flowchart); Introduzione ai blocchi, condizione e iterazioni (WHILE e DO WHILE);
Programmazione in C
Appunti chiave per programmare in C
il romanico
elementi del romantico
Composti chimici inorganici
Composti chimici inorganici + nomenclatura
EXCEL
riferimenti, funzioni (SE, CONTA.SE, CONFRONTA, CERCA.VERT, SOMMA.SE, MAX e MIN, E), copia e incolla, riempimento automatico, subtotali
le reti informatiche
i vari tipi di reti (con disegni)
Informatica 1
Primi argomenti di informatica della prima superiore, Architettura di VON NEUMANN, Hardware software, Il case e la scheda madre, Periferiche e schede e porte di comunicazione, l’unità centrale di elaborazione e la memoria centrale, la memoria RAM…..
HTML
come creare un sito web da 0
Contenuti più popolari
9Riassunto patente B
Riassunto patente B - appunti presi a lezione
Teoria patente b
Tutti gli argomenti per la patente
I promessi sposi
Riassunti completi di tutti i 38 capitoli dei Promessi sposi.
Teoria patente di guida B: Segnali stradali
Segnali stradali di pericolo, luminosi, di prescrizione, di indicazione, temporanei, complementari, pannelli integrativi, segnaletica orizzontale, segnalazioni agenti del traffico, distanza di visibilità per l‘arresto, minima di sicurezza.
PATENTE
schemi per esame teorico della patente
Sintesi finale di Analisi logica
Esercitazione completa di analisi logica su frasi articolate per consolidare la conoscenza di tutti i complementi.
Programma di italiano per la maturità
Decadentismo, Pascoli, D'Annunzio, la poesia e il romanzo di primo 900, il romanzo della crisi, le avanguardie storiche, Svevo, Pirandello, Ungaretti, l'ermetismo, Calvino (nel mio profilo trovate anche montale)
Present Simple vs Present Continuous
Develop the ability to choose correctly between the Present Simple for habits and the Present Continuous for ongoing actions.
ITALO SVEVO e LUIGI PIRANDELLO
schemi perfetti su Svevo (vita, poetica, stile, opere “Una vita”, “Senilità”, “Coscienza di Zeno”), Pirandello ( vita, poetica, stile, opere “Novelle per un anno”, “Fu Mattia Pascal”, “Uno nessuno centomila”, teatro “6 personaggi in cerca di autore”)
Non c'è niente di adatto? Esplorare altre aree tematiche.
Recensioni dei nostri utenti. Ci adorano - e anche tu, vedrai .
L'applicazione è molto facile da usare e ben progettata. Finora ho trovato tutto quello che cercavo e ho potuto imparare molto dalle presentazioni! Utilizzerò sicuramente l'app per i compiti in classe! È molto utile anche come fonte di ispirazione.
Questa applicazione è davvero grande! Ci sono tantissimi appunti e aiuti con lo studio [...]. La mia materia problematica, per esempio, è il francese e l'app ha così tante opzioni per aiutarmi. Grazie a questa app ho migliorato il mio francese. La consiglio a tutti.
Wow, sono davvero stupita. Ho appena provato l'app perché l'ho vista pubblicizzata molte volte e sono rimasta assolutamente sbalordita. Questa app è L'AIUTO che cercate per la scuola e soprattutto offre tantissime cose, come allenamenti e schede, che a me personalmente sono state MOLTO utili.
Macchina Di Von Neumann
Appunti presi in merito alla macchina di Von Neumann: presenti argomenti come Bus, CPU, Cache, RAM, ROM e altre memorie.

Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Iscriviti per mostrare il contenuto. È gratis!
- Accesso a tutti i documenti
- Migliora i tuoi voti
- Unisciti a milioni di studenti
Pensavamo che non l'avreste mai chiesto....
Che cos'è l'assistente AI di Knowunity?
Il nostro assistente AI è costruito specificamente per le esigenze degli studenti. Sulla base dei milioni di contenuti presenti sulla piattaforma, possiamo fornire agli studenti risposte davvero significative e pertinenti. Ma non si tratta solo di risposte, l'assistente è in grado di guidare gli studenti attraverso le loro sfide quotidiane di studio, con piani di studio personalizzati, quiz o contenuti nella chat e una personalizzazione al 100% basata sulle competenze e sugli sviluppi degli studenti.
Dove posso scaricare l'applicazione Knowunity?
È possibile scaricare l'applicazione dal Google Play Store e dall'Apple App Store.
Knowunity è davvero gratuita?
Sì, hai accesso completamente gratuito a tutti i contenuti nell'app e puoi chattare o seguire i Creatori in qualsiasi momento. Sbloccherai nuove funzioni crescendo il tuo numero di follower. Inoltre, offriamo Knowunity Premium, che consente di studiare senza alcun limite!!
Contenuti più popolari: sistema informatico
9Informatica 1
Primi argomenti di informatica della prima superiore, Architettura di VON NEUMANN, Hardware software, Il case e la scheda madre, Periferiche e schede e porte di comunicazione, l’unità centrale di elaborazione e la memoria centrale, la memoria RAM…..
Introduzione all’Informatica
Questa è una presentazione sulle basi dell’informatica
Cos'è L'informatica, software e hardware ~ riassunto
ecco a voi un riassunto su Cos'è L'informatica, l'algoritmo, software e hardware, le memorie ecc...
Hardware & software
Riassunto hardware e software
I sistemi operativi
I sistemi operativi.
La struttura del Computer
Powerpoint sulla struttura del computer.
IL SISTEMA OPERATIVO
Presentazione riguardo il sistema operativo, le sue competenti, la storia del computer, i virus, i browsers e tanto altro
Software e Hardware
Informatica
Sistemi di Architettura e Von Neumann
Sistemi di elaborazione digitale e il computer
Contenuti più popolari di Informatica
9Stranger Things
Quanto Ne Sai Sulla Fantastica Serie Netflix Stranger Things??
Diagrammi di flusso
Appunti per ripasso dei diagrammi di flusso (flowchart); Introduzione ai blocchi, condizione e iterazioni (WHILE e DO WHILE);
Programmazione in C
Appunti chiave per programmare in C
il romanico
elementi del romantico
Composti chimici inorganici
Composti chimici inorganici + nomenclatura
EXCEL
riferimenti, funzioni (SE, CONTA.SE, CONFRONTA, CERCA.VERT, SOMMA.SE, MAX e MIN, E), copia e incolla, riempimento automatico, subtotali
le reti informatiche
i vari tipi di reti (con disegni)
Informatica 1
Primi argomenti di informatica della prima superiore, Architettura di VON NEUMANN, Hardware software, Il case e la scheda madre, Periferiche e schede e porte di comunicazione, l’unità centrale di elaborazione e la memoria centrale, la memoria RAM…..
HTML
come creare un sito web da 0
Contenuti più popolari
9Riassunto patente B
Riassunto patente B - appunti presi a lezione
Teoria patente b
Tutti gli argomenti per la patente
I promessi sposi
Riassunti completi di tutti i 38 capitoli dei Promessi sposi.
Teoria patente di guida B: Segnali stradali
Segnali stradali di pericolo, luminosi, di prescrizione, di indicazione, temporanei, complementari, pannelli integrativi, segnaletica orizzontale, segnalazioni agenti del traffico, distanza di visibilità per l‘arresto, minima di sicurezza.
PATENTE
schemi per esame teorico della patente
Sintesi finale di Analisi logica
Esercitazione completa di analisi logica su frasi articolate per consolidare la conoscenza di tutti i complementi.
Programma di italiano per la maturità
Decadentismo, Pascoli, D'Annunzio, la poesia e il romanzo di primo 900, il romanzo della crisi, le avanguardie storiche, Svevo, Pirandello, Ungaretti, l'ermetismo, Calvino (nel mio profilo trovate anche montale)
Present Simple vs Present Continuous
Develop the ability to choose correctly between the Present Simple for habits and the Present Continuous for ongoing actions.
ITALO SVEVO e LUIGI PIRANDELLO
schemi perfetti su Svevo (vita, poetica, stile, opere “Una vita”, “Senilità”, “Coscienza di Zeno”), Pirandello ( vita, poetica, stile, opere “Novelle per un anno”, “Fu Mattia Pascal”, “Uno nessuno centomila”, teatro “6 personaggi in cerca di autore”)
Non c'è niente di adatto? Esplorare altre aree tematiche.
Recensioni dei nostri utenti. Ci adorano - e anche tu, vedrai .
L'applicazione è molto facile da usare e ben progettata. Finora ho trovato tutto quello che cercavo e ho potuto imparare molto dalle presentazioni! Utilizzerò sicuramente l'app per i compiti in classe! È molto utile anche come fonte di ispirazione.
Questa applicazione è davvero grande! Ci sono tantissimi appunti e aiuti con lo studio [...]. La mia materia problematica, per esempio, è il francese e l'app ha così tante opzioni per aiutarmi. Grazie a questa app ho migliorato il mio francese. La consiglio a tutti.
Wow, sono davvero stupita. Ho appena provato l'app perché l'ho vista pubblicizzata molte volte e sono rimasta assolutamente sbalordita. Questa app è L'AIUTO che cercate per la scuola e soprattutto offre tantissime cose, come allenamenti e schede, che a me personalmente sono state MOLTO utili.